電気電子系 News
超小型ソーラーセイルの打ち上げに向けた開発を開始
推進剤フリーな姿勢・軌道制御技術の実証を目指す
ポイント
- 超小型ソーラーセイルによる姿勢・軌道統合制御の実証ミッションに向けた衛星開発を開始
- ソーラーセイルの姿勢制御で生じる外乱トルクをジンバル機構によって解決
- 本格的な深宇宙探査の実現にも寄与する完全に推進剤フリーな技術の実現に期待
概要
東京科学大学(Science Tokyo)※ 工学院 機械系の中条俊大准教授、総合研究院 量子航法センターの渡邉奎特任助教、JAXA宇宙科学研究所 宮崎康行教授、株式会社cosmobloom 福永桃子代表取締役、東京科学大学 理学院 物理学系の谷津陽一准教授、工学院 機械系の中西洋喜准教授、工学院 電気電子系の戸村崇助教(電気電子コース 主担当)らの研究チームが提案する超小型衛星ミッション「超小型ソーラーセイルによる姿勢・軌道統合制御」が、JAXAの「産学官による輸送・超小型衛星ミッション拡充プログラム(拡充P、通称JAXA-SMASH)」の第2回公募[参考資料1]においてフィージビリティ・スタディ[用語1]フェーズへ選定され共同研究を実施したところ、今般、衛星開発フェーズへの移行が決定しました。今後、超小型ソーラーセイルPIERISの地球周回軌道[用語2]への打ち上げに向け、衛星開発を行います。
ソーラーセイルは、物体に太陽光が当たることで生じる力(太陽輻射圧)を積極的に利用して推進する衛星(宇宙機[用語3])であり、推進剤を消費せずに軌道変更を行えます。推進剤の搭載量が少ない超小型衛星の推進性能を大きく向上させられ、将来的には月近傍や惑星間といった深宇宙[用語4]探査での活躍が期待されます。国内では、2010年に宇宙科学研究所(JAXA)のIKAROSが世界初の惑星間を航行するソーラーセイル実証機として成功を収めています。
PIERISは、IKAROSとは異なる、ジンバル機構を利用した新たな姿勢・軌道統合制御技術の実証を行います。研究グループはPIERISの開発を通して、本格的な深宇宙探査ミッションにおいて重要となる完全推進剤フリーな宇宙機の制御技術を、まずは地球周回軌道にて獲得することを目指します。
これまでのミッション設計・衛星システム設計に関する成果は、3月18日に開催された「超小型衛星利用シンポジウム2025」、および7月12日~18日に開催される「35th International Symposium on Space Technology and Science」にて発表されます。
※2024年10月1日に東京医科歯科大学と東京工業大学が統合し、東京科学大学(Science Tokyo)となりました。
背景
物体に太陽光が当たることで生じる力(太陽光に押される力)を太陽輻射圧と呼びます。その大きさは非常に小さく、地上ではそれを実感することはありません。しかし、宇宙空間で反射率が高い大きな帆(セイル)を広げれば、この太陽輻射圧によって長い時間をかけて加速し、軌道変更することができます。この原理を積極的に利用して推進する宇宙機をソーラーセイルと呼びます。一般的な宇宙機は、軌道変更(制御)する際には推進剤を消費してガスを噴射する必要があるため、どれだけの時間、どれだけの加速量だけ軌道変更できるかは推進機の性能と推進剤の搭載量によって決まります。一方、ソーラーセイルは推進剤を消費しないため、うまく利用すれば、原理的にはいつまでも軌道制御し続けられることになり、さまざまな宇宙ミッションに有効であるといえます。ソーラーセイルは、加速によって太陽から離れる方向にしか軌道変更できないと思われがちですが、実際は太陽方向に対する姿勢を変える(姿勢制御する)ことで、加速と減速を切り替えられるので、太陽方向から離れることも近付くこともできます(図1)。
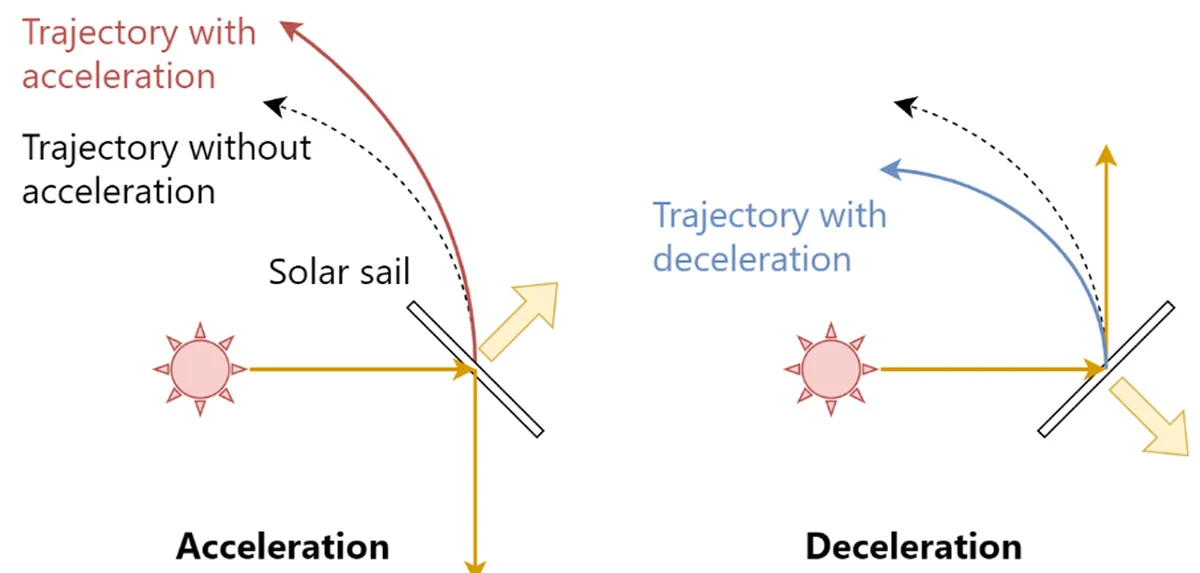
図1. ソーラーセイルによる軌道変更のイメージ
ところが、太陽輻射圧は軌道変更に用いることができる一方で、宇宙機の姿勢運動に影響する外乱トルクも生じさせます。深宇宙では一般的に、外乱トルクにより蓄積する宇宙機の角運動量[用語5]を放出するためには、推進機により推進剤を噴射することが求められます。安定した姿勢制御は前述のようなソーラーセイルによる軌道変更には不可欠ですが、そのために推進剤を消費するのでは、ソーラーセイルの特長が失われてしまうことになります。2010年に打ち上げられたJAXA宇宙科学研究所のIKAROSは、惑星間を航行する世界初のソーラーセイルとしてさまざまな技術実証を成功させましたが、そのミッションの中でも、太陽輻射圧による外乱トルクの影響は確認されており、本格的な深宇宙探査の実現のためには解決が不可欠な重要課題とされています。
研究成果
中条俊大准教授らはこれまでの研究で、太陽輻射圧による外乱トルクを制御し、姿勢・軌道を統合的に制御する手段の一つとして、ジンバル機構を利用した制御システムを提案してきました[参考資料2]。これは、セイルと宇宙機構体の相対回転を可能とする回転駆動機構(図2)で、宇宙機の姿勢に応じて質量中心の位置を適切に変化させることで、外乱トルクを最小限に抑えられるようになります。また、角運動量が蓄積しても、質量中心の位置を適切に調整すれば、太陽輻射圧トルクの作用方向を角運動量の反対にして放出させることもできます。これにより、理論上は完全に推進剤フリーな姿勢・軌道統合制御が可能になります。なお、ジンバル機構を用いた制御というアイデアは、旧東京工業大学で故・松永三郎教授らによって開発された、可変形状姿勢制御実証衛星ひばり(2021年打ち上げ)に着想を得ています。
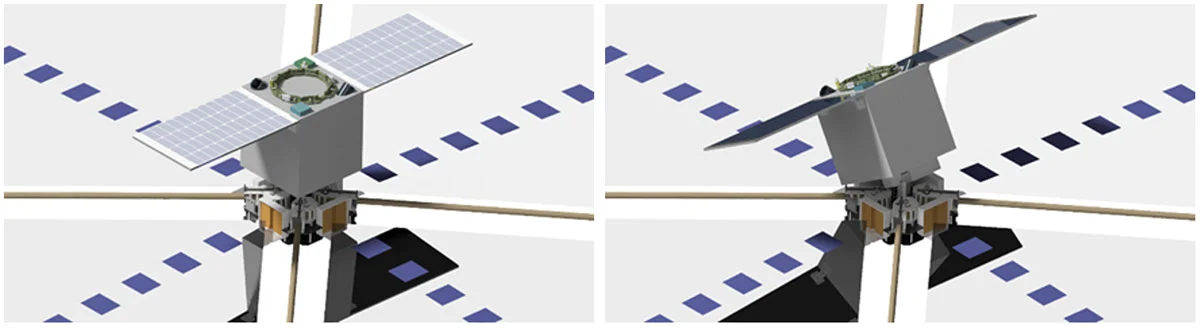
図2. ジンバルのイメージ(Photo by 東京科学大学、JAXA宇宙科学研究所)
研究チームは、こうした新しい技術の宇宙実証を行うべく、2023年度に、超小型衛星の開発費と(地球周回軌道への)打ち上げ機会が提供される、JAXAの「産学官による輸送・超小型衛星ミッション拡充プログラム(拡充P、通称JAXA-SMASH)」にミッションを提案し、1年間のフィージビリティ・スタディを行うテーマとして採択されました。そして今回、フィージビリティ・スタディの成果がフェーズ移行審査を通過し、衛星開発フェーズに移行できることが決まりました。これにより、超小型ソーラーセイルPIERIS(Powered Innovative Earth-orbiter with Reorientable Inclined Sail)の開発費用と打ち上げ機会を獲得できました。なお、衛星開発活動は既に開始しています。
PIERISは、JAXA宇宙科学研究所の宮崎研究室および株式会社cosmobloomが新たに開発する、一辺5 mのピラミッド形状(四角錐形状)のセイルと、それを支持・展開する自己伸展ブームを備え、これらの装置一式が、ジンバル機構を介して衛星構体に取り付けられます(図3)。東京科学大学は、ミッションおよび衛星システム(姿勢・軌道統合制御システムを含む)の設計・開発、全体の取りまとめを担当しています。これまでのフィージビリティ・スタディでは、地球周回軌道を飛行しながら、セイル展開に続いてさまざまな姿勢・軌道統合制御実験を実施するミッション、およびそれらを実現する衛星システムの設計を行いました。ミッションには発展的な技術実証として、セイル上に搭載する多数の薄膜太陽電池による発電実験や、その電力を利用した推進機による(ソーラーセイルと組み合わせたハイブリッド推進による)軌道制御実験も組み込まれています。深宇宙と地球周回軌道では、姿勢・軌道運動の様子は異なるものの、本ミッションで獲得できる技術は深宇宙探査にも応用可能となるものです。
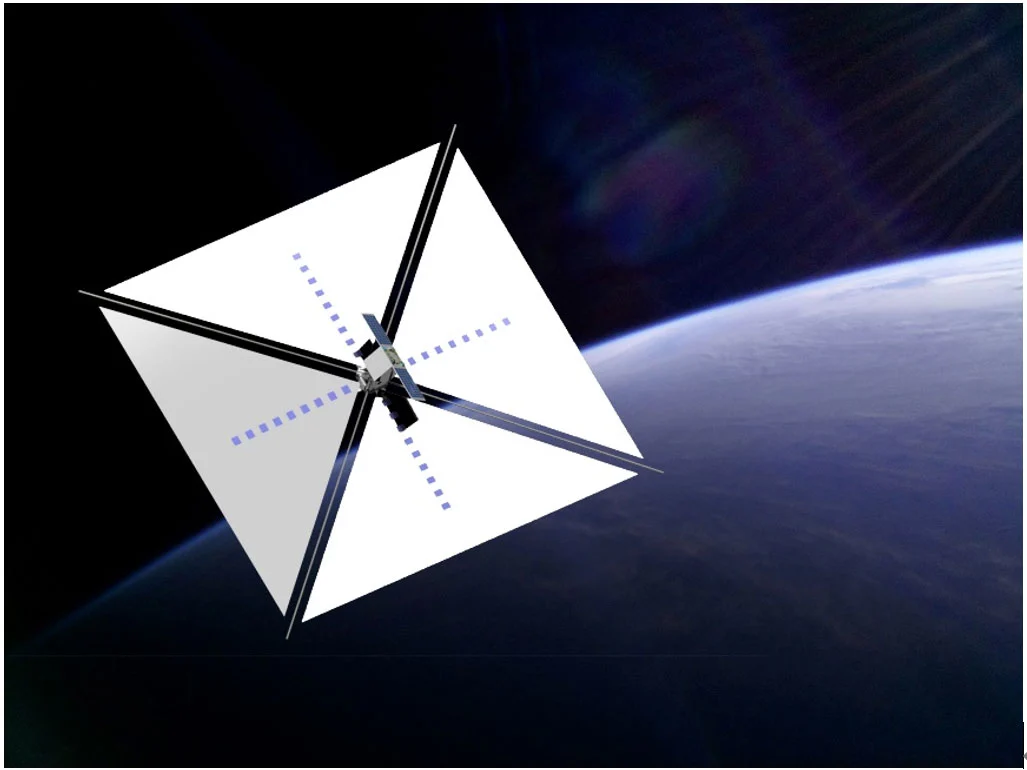
図3. 超小型ソーラーセイルPIERISのイメージ(Photo by 東京科学大学、JAXA宇宙科学研究所)
社会的インパクト
国内では、前述のIKAROS(2010年打ち上げ)以来のソーラーセイルの打ち上げとなります。近年では、NASAなどによる超小型ソーラーセイルが複数実現していますが、今回開発する新たなソーラーセイルにより、日本が再びこの分野でリードできると期待されます。また、地球周回軌道で技術実証することで、ソーラーセイル技術だけでなく、スペースデブリ[用語6]問題の解決に向けた、運用終了後の衛星のデオービット[用語7]に関連する技術(セイルを用いた軌道下降技術)にもつながります。
今後の展開
研究チームは今後、現在の衛星開発フェーズにおいてPIERISの開発を進めて、衛星の完成と地球周回軌道でのミッションの成功を目指します。さらにPIERISの次の将来展望として、新たな超小型ソーラーセイルによる深宇宙探査ミッションを計画しています。
- 付記
本研究は、JAXA-SMASH超小型衛星ミッション[用語8]公募#2「超小型ソーラーセイルによる姿勢・軌道統合制御」のフィージビリティ・スタディの成果です。
- 用語説明
| [用語1] | フィージビリティ・スタディ:ミッション実現性の検討。 |
|---|---|
| [用語2] | 地球周回軌道:人工衛星が地球の周囲を周回する軌道。ここでは太陽輻射圧トルクの他に大気抵抗トルクなどが作用するため、深宇宙と比べて姿勢運動は複雑となり得るが、地球の磁場を利用した姿勢制御が可能なため、推進機を用いなくても角運動量を放出することができる。 |
| [用語3] | 宇宙機:地球を周回する人工衛星と地球以外の天体を探査する探査機の総称。 |
| [用語4] | 深宇宙:地球周辺を離れた宇宙の遠方領域。地球から離れたところでは、姿勢運動に影響する外乱トルクは主に太陽輻射圧トルクであり、地球の磁場を利用した姿勢制御はできない。したがって、角運動量の放出には、一般的には推進機により推進剤を噴射することが必要となる。 |
| [用語5] | 角運動量:物体(ここでは宇宙機)の回転運動の勢いを表す物理量。三軸姿勢安定方式を採る場合、外乱トルクの影響下で宇宙機自体が回転することがないよう、リアクションホイールというアクチュエータを回転させることで角運動量を保持する。しかし、回転数には上限があり、上限に達する前に推進機などによりこれを放出する方向にトルクを与えなければならない。 |
| [用語6] | スペースデブリ:地球周回軌道を飛行する宇宙ゴミ。使用済みまたは故障した衛星やロケットの上段、それらの破片などがある。年々増加しており、運用中の人工衛星に衝突し破壊してしまう問題がある。 |
| [用語7] | デオービット:(運用を終えた)人工衛星などを軌道上から離脱させ、大気圏に再突入させること。人工衛星が運用終了時に推進機を用いて軌道高度を下げることも可能であるが、セイルを用いれば、大気抵抗を利用して、特別な制御なしにこれができる。 |
| [用語8] | JAXA-SMASH超小型衛星ミッション:大学、企業、JAXA が連携し、革新技術にも挑戦する超小型衛星ミッションを、民間小型飛翔機会を活用して実現するとともに、輸送サービス多様化を促す研究開発プログラム。 |
- 参考資料
| [1] |
超小型衛星ミッション公募#2 | JAXA-SMASH 輸送・超小型衛星ミッション拡充プログラム |
|---|---|
| [2] |
Chujo, T., Watanabe, K., and Takao, Y., "Integrated attitude—orbit control of solar sail with single-axis gimbal mechanism," Astrodynamics, Vol. 8, No. 4, 2024, pp. 483-506. https://doi.org/10.1007/s42064-023-0192-2 |
研究者プロフィール
中条 俊大 Toshihiro CHUJO
東京科学大学 工学院 機械系 准教授
研究分野:宇宙航行力学、宇宙ミッション設計

渡邉 奎 Kei WATANABE
東京科学大学 総合研究院 量子航法センター 特任助教
研究分野:衛星姿勢航法・制御,編隊飛行
関連リンク
- JAXAの「革新的衛星技術実証4号機」に膜面展開アンテナ技術の実証衛星が選定|旧・東京工業大学
- 可変形状姿勢制御実証衛星「ひばり」を開発|旧・東京工業大学
- 産学連携でつくるオーロラ観測用紫外線カメラ打ち上げへ|旧・東京工業大学
- 産学連携のチームによる陸・海観測超小型衛星プロジェクト|旧・東京工業大学
- 研究テーマを宇宙で実証 JAXAのイプシロンロケット4号機で打上げへ|旧・東京工業大学
- 中条俊大 Toshihiro Chujo|研究者検索システム Science Tokyo STAR Search
- 中西洋喜 Hiroki Nakanishi|研究者検索システム Science Tokyo STAR Search
- 渡邉奎 Kei Watanabe|研究者検索システム Science Tokyo STAR Search
- 谷津陽一 Yoichi Yatsu|研究者検索システム Science Tokyo STAR Search
- 戸村崇 Takashi Tomura|研究者検索システム Science Tokyo STAR Search
- 中条研究室
- 中西研究室
- 河合・谷津研究室
- 戸村研究室
- 工学院 機械系
- 総合研究院 量子航法研究センター
- 理学院 物理学系
- 系外惑星観測研究センター|理学院
- 電気電子コース(大学院課程)|教育|工学院 電気電子系
- 電気電子系(学士課程)|教育|工学院 電気電子系
- 工学院|大学組織一覧|SCIENCE TOKYOについて
- 総合研究院|大学組織一覧|SCIENCE TOKYOについて
- 理学院|大学組織一覧|SCIENCE TOKYOについて
- JAXA 宇宙科学研究所
- 株式会社cosmobloom
- 超小型衛星利用シンポジウム2025|JAXA新事業促進部
- International Symposium on Space Technology and Science (ISTS)
おすすめ記事
-
2026.07.14
-

2026.07.14
-
2026.07.10
-
2026.07.01
-
2026.06.29
![]()