機械系 News
ペンギンが羽ばたいて旋回する遊泳メカニズムを解明
腹を内側に向け、翼の打ち上げで曲がる
要点
- 腹を旋回の内側に向けるように体を傾け、翼を打ち上げて旋回するという、ペンギンの羽ばたき旋回遊泳のメカニズムを解明。
- 長崎ペンギン水族館で、羽ばたいて旋回遊泳するジェンツーペンギンを最大14台の水中ビデオカメラで同時撮影した画像から、翼と体の運動および流体力を解析。
- ペンギンが水中遊泳に適応進化したプロセスの理解への貢献と、俊敏なペンギン模倣型遊泳ロボットへの応用に期待。
概要
東京工業大学 工学院 機械系の原田夏輝大学院生(研究当時、修士課程学生)と田中博人准教授(機械コース 主担当)は、ペンギンの旋回遊泳を水族館で多数の水中ビデオカメラを用いて撮影した動画から、運動と流体力を解析して、ペンギンが翼を羽ばたかせて旋回する遊泳メカニズムを明らかにした。
ペンギンは羽ばたいて旋回するとき、翼の打ち上げ[用語1]の前から腹が旋回内側に向くように体を傾け(バンク)、打ち上げ時に内側の翼を外側の翼よりも高く打ち上げて、左右の翼を合わせた流体力が旋回中心方向の向心力を生むことで旋回する。続く打ち下ろし[用語2]では、主に内側の翼が前向きの推力を発生して、体の背腹軸まわりの回転(ヨー)が減速されることで旋回は抑制され、むしろ前向きに加速する。つまり、体のバンクと打ち上げで旋回し、続く打ち下ろしでは旋回を止めて前進する。
ペンギンの遊泳については、本研究室の以前の研究によって、羽ばたいて前進する際の基本的な推進メカニズムが解明されていた。さらに本研究では、旋回という機動遊泳において、自在に動かしうる翼をペンギンがどのように使うのかが明らかにされた。これにより、祖先は空中を飛行していた鳥類であるペンギンがどのように水中遊泳に適応進化したのかについての理解につながる。さらに、ペンギンのような俊敏な羽ばたき遊泳ロボットへの応用が期待できる。
本研究成果は、2022年12月22日付の「Journal of Experimental Biology」に掲載された。

羽ばたいて右旋回するジェンツーペンギン(撮影:長崎ペンギン水族館)
背景
ペンギンは、空中を飛行していた鳥類が水中の遊泳に適応進化した鳥であり、飛行能力を失った代わりに優れた水中遊泳能力を獲得し、翼を羽ばたかせて推進する。直進するときに翼をどのように動かして流体力を生み出すのかという推進メカニズムについては、これまでに本研究室が行ってきた、長崎ペンギン水族館のジェンツーペンギンの遊泳運動解析と流体力解析の研究により明らかになっている[注1]。しかし、旋回のような複雑な機動遊泳のメカニズムは、依然として未解明だった。
そこで本研究では、撮影データの解析をさらに進め、水平面内の羽ばたき旋回遊泳のメカニズムを明らかにした。
研究成果
2018年と2019年に長崎ペンギン水族館で、運動解析用マーカを付けた3個体のジェンツーペンギンの羽ばたき遊泳を、水中ビデオカメラ12台ないし14台で撮影した。取得した画像から3次元運動解析を行い、その運動データに基づいて翼と体の流体力を計算した。解析した羽ばたきの数は、水平旋回が14羽ばたき、水平直進が40羽ばたきである。今回の旋回は、旋回半径が平均1.0 mと緩やかなものである。解析は、右旋回は反転させて、全て左旋回として扱った。
ペンギンの羽ばたきサイクルは必ず打ち上げから始まり、打ち上げ終わりから間もなく打ち下ろしが始まる。体の水平面に対する姿勢角度は、航空機力学に準じて、体方位角(Heading)、仰角(Elevation)、バンク角(Bank)で表した。また、体の回転運動は、背腹軸周りのヨー、左右軸周りのピッチ、体軸周りのロールで表した(図1(A))。さらにペンギンの速度の方位角を速度方位角(Bearing)とした。ペンギンは主に体軸方向に泳ぐため、水平旋回するときは速度方位角と体方位角の両者が変化する(図1(B))。
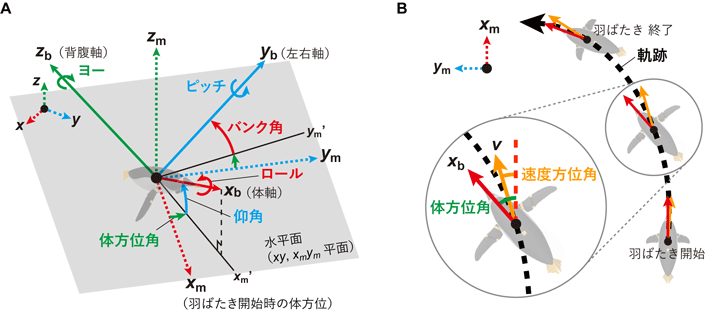
図1. ペンギンの水平面に対する姿勢角(A)と軌跡(B)。
今回の緩やかな水平旋回の運動解析の結果、ペンギンは打ち上げ開始前に、旋回内側に腹が向くようにバンク(平均15度)していることが確認された。このバンクの向きは、旋回する飛行機のバンクと逆である。そして速度方位角は打ち上げ中に大きく増加した(羽ばたき中の増分の76%)。同様に、機首方位角も打ち上げ中に大きく増加した(羽ばたき中の増分の65%)。つまり、打ち上げが旋回に大きく貢献していたことになる。
左水平旋回には、体の軌跡を左方向に曲げるために、左方向への向心力が必要である。確かに打ち上げ中には、打ち下ろし中よりも、体の左方向に大きな並進加速度が生じていた。ところが体軸方向には、打ち下ろし中の方が打ち上げ中よりも大きな並進加速度が生じていた(1.6倍)。つまり、水平旋回中の打ち下ろしは、前方への推進に貢献していることになる。これは、直進遊泳時には打ち上げの方が打ち下ろしよりも前進に貢献していたのとは、逆の結果である。
それでは、翼と体はどのように連動して旋回を実現するのだろうか。まず体のバンクによって、打ち上げ中の腹方向への流体力が旋回内側に傾くことで、体の軌跡を左方向に曲げるための向心力を生み出す(図2(B))。さらに左翼(旋回内側の翼)を高く打ち上げることで、左翼の流体力が向心力を打ち消さないようにしている。打ち下ろし時には、左翼は高い位置から振り下ろすため右翼よりも大きな流体力を発生し、それが大きな前向き成分を持って推進に貢献する(図2(C))。また、この打ち下ろし中の左翼の推力は、体方位角の増加にブレーキをかける負のヨートルクをもたらす。
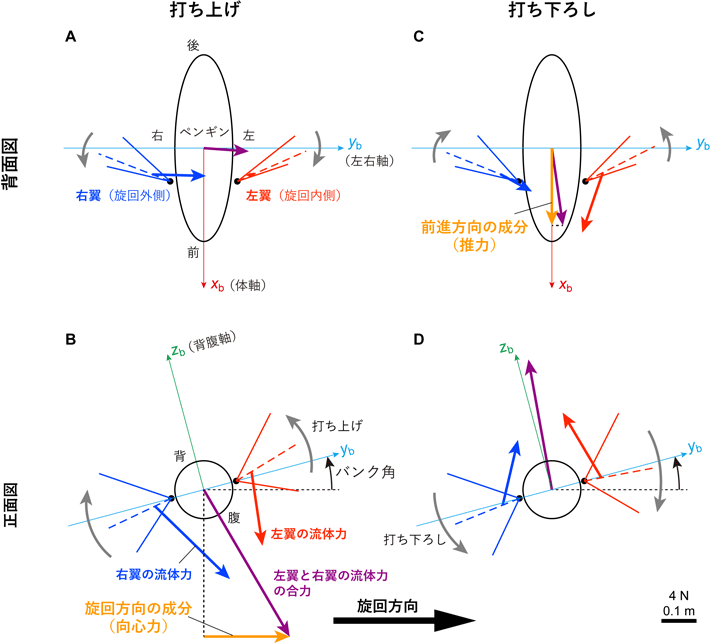
図2. ペンギンの翼の流体力。
以上をまとめると、羽ばたき旋回遊泳のメカニズムは次のようになる。
- 1.打ち上げ前に腹が旋回内側に向くようにバンク角をとる。
- 2.打ち上げ時には、旋回内側の翼を外側よりも大きく打ち上げ、腹方向の流体力を旋回方向の向心力として利用し、軌跡を曲げて旋回する。
- 3.打ち下ろし中は、旋回内側の翼の流体力の前向き成分(推力)が大きく、前進する。
- 4.打ち下ろし中の旋回内側の翼の大きな推力は、体のヨー回転にブレーキをかけて旋回を抑制する。
バンクの向きは、旋回する飛行機のバンクとは逆である(図3)。これは、飛行機が下向きの重力に対抗するために上向きの力を発生する必要があるのに対して、ペンギンは上向きの浮力に対抗するために下向きの力を出す必要があるためだと考えられる。
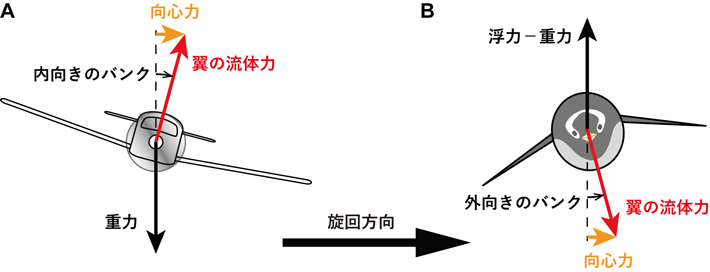
図3. 左旋回する飛行機(A)とペンギン(B)のバンクと力の方向の模式図。
社会的インパクト
本研究で明らかになった「ペンギンはどのように泳ぐのか」という力学メカニズムの理解は、ペンギンの形態学や生態学に新たな視点を提供する。さらにそうした視点から「空中を飛行していた鳥類がいかに水中遊泳に適応進化したのか」というペンギンの進化生物学の謎に、力学の面から迫ることができる。
今後の展開
今回の緩やかな旋回の研究結果をベースに、より高速で急な旋回や、急上昇・急降下、あるいは急加速・急減速といった、多様で俊敏な機動遊泳の性能とメカニズムの研究を実施する。また、これらの俊敏性を備えるペンギン模倣型羽ばたき遊泳ロボット[注2]への応用を進める。
- 付記
本研究はJSPS科研費新学術領域研究「ソフトロボット学」JP18H05468の助成を受けた。
- 注
[1] 本学のニュースリリース(2021年11月4日)「ペンギンが翼をしなやかに変形させ、効率よく泳ぐメカニズムを解明![]() 」
」
[2] 関連特許:田中博人、栢菅宏規 “羽ばたき動作機構及び羽ばたき動作機構の使用方法、並びに、羽ばたき動作機構を用いた推進装置”
公開日 2020年4月2日(特開2020-050315)
出願日 2018年9月28日(特願2018-184512)
※特許の詳細は特許情報プラットフォーム![]() で「特開2020-050315」を検索すると確認できる。
で「特開2020-050315」を検索すると確認できる。
関連資料:田中博人![]() “ペンギンロボット-小型で俊敏な水中ドローンを実現する電動羽ばたき翼運動機構” JST 東京工業大学 新技術説明会 2019(2019年11月19日)
“ペンギンロボット-小型で俊敏な水中ドローンを実現する電動羽ばたき翼運動機構” JST 東京工業大学 新技術説明会 2019(2019年11月19日)
- 論文情報
| 掲載誌 : | Journal of Experimental Biology |
|---|---|
| 論文タイトル : | Kinematic and hydrodynamic analyses of turning manoeuvres in penguins: body banking and wing upstroke generate centripetal force |
| 著者 : | Natsuki Harada, Hiroto Tanaka |
| DOI : | 10.1242/jeb.244124 |
- ペンギンの体表は流体摩擦抵抗を低減|東工大ニュース
- ペンギンが翼をしなやかに変形させ、効率よく泳ぐメカニズムを解明|東工大ニュース
- MBS毎日放送「あしたワクワク未来予報」に田中博人准教授が出演|機械系 News
- BSフジ「ガリレオX」に工学院の田中博人准教授が出演|東工大ニュース
- 生物から学ぶ新技術 深化するバイオミメティクス |ガリレオX 第226回 - YouTube ガリレオCh
- 田中博人研究室
- 田中博人 Hiroto Tanaka|研究者検索システム 東京工業大学STARサーチ
- 機械コース(大学院課程)|教育|工学院 機械系
- 機械系(学士課程)|教育|工学院 機械系
- 長崎ペンギン水族館
- 研究成果一覧

おすすめ記事
-
2026.06.12
-
2026.05.25
-
2026.05.20
-
2026.05.19
-
2026.05.19
![]()