機械系 News
東工大学生チームが「きぼう」ロボットプログラミング競技会で世界3位に
東京工業大学の学生チームが10月29日に行われた第3回「きぼう」ロボットプログラミング競技会(Kibo-RPC)の軌道上決勝大会に出場し、世界第3位となりました。

決勝大会後の集合写真(前列右から三木さん、大坪さん、安田さん、石井さん、西尾さん)
Kibo-RPCはJAXA (宇宙航空研究開発機構)が主催する国際的なプログラミングコンテストです。地球を周回する国際宇宙ステーション(ISS)の「きぼう」日本実験棟を舞台に、NASA(アメリカ航空宇宙局)が開発したAstrobee(アストロビー)と呼ばれるキューブ型のロボットを使用しエンジニアリング力を競います。参加者はNASAが公開しているAstrobeeのソースコードを元にミッションを遂行するためのプログラムを作成し、経過時間とミッション達成度に応じて与えられる得点で評価されます。2022年度のコンテストの特徴はAstrobeeでレーザ照射する的の位置がランダムに変化することです。高得点を記録するためには スピーディーにミッションをこなすのみならず、ARタグの読み取りや的の中心を把握する画像認識の技術、目標位置・姿勢にロボットを動かす制御アルゴリズムを組み合わせ、レーザ照射精度を高める必要があります。
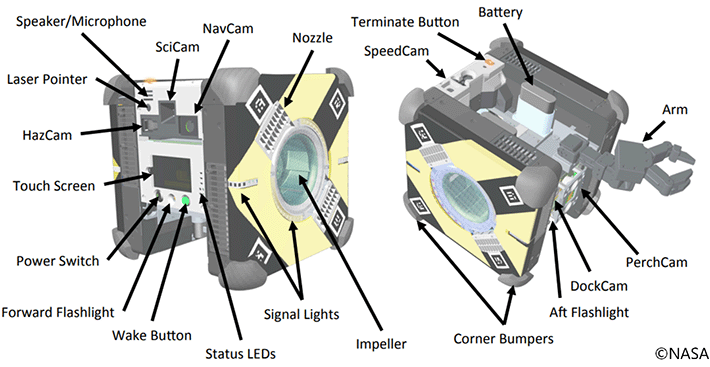
Astrobeeの形状
同チームは7月9日に行われた日本国内予選において1位となり軌道上決勝大会の出場権を獲得しました。予選大会は宇宙環境を忠実に模擬したシミュレーションにて競技する一方、決勝大会は事前に作成したプログラムを実際にAstrobeeに書き込み、ISS内で動作させて競います。
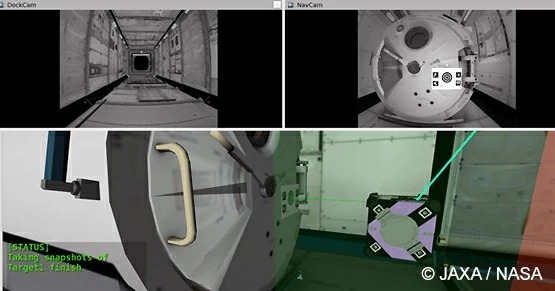
シミュレーションを実行した画面
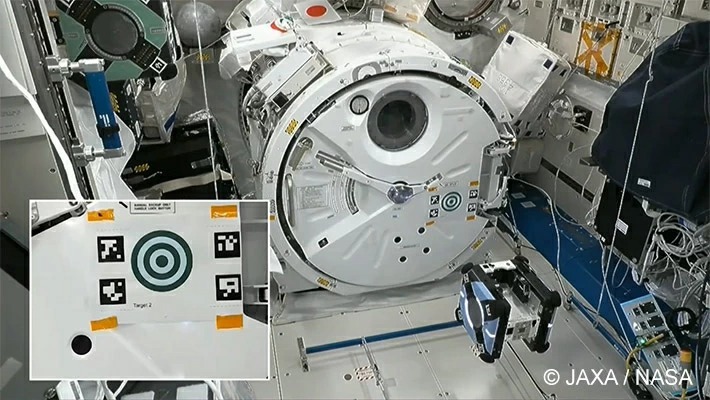
的に向かうキューブ型ロボットAstrobee
Kibo-RPCは工学院 機械系機械コースの「宇宙システムイニシアティブ」という授業の一環として取り組んでおり、過去にも本講義の受講生が参加してきました。初年度となる2020年には3ヵ月間のコロナ禍の行動制限の中、作品提出締め切り2週間前に参加登録を行い、短期間の準備で善戦し、2021年の第2回大会ではわずかな差で国内予選2位でした。今回の第3回は過去2回の経験とノウハウをもとに、さらに改良したシミュレータを用いた学生チームが国内予選で第1位通過しました。各国の予選を勝ち抜いたチームが集まった世界大会では、国際宇宙ステーション・きぼうの与圧部にて、NASAのAstrobeeを実際に稼働させ第3位となりました。
学生チームのメンバー
- 三木晴太さん
- 石井泰大さん
- 大坪恵人さん
- 西尾陸さん
- 安田萌恵さん
チームリーダーの三木晴太さんのコメント
自分の書いたプログラムを用いて実際に国際宇宙ステーション内でAstrobeeを動かせることに魅力を感じ、Kibo-RPCに応募しました。国内予選は、プログラムの改良とシミュレーションを繰り返しながら、安定して高得点を取れるプログラムを目指しました。特に、2つ目の的は位置が変化するため照射精度を上げるのに苦労しましたが、チームで課題を共有しさまざまなアイデアを試すことで精度の向上に成功しました。その結果、国内予選で優勝し、軌道上決勝への進出を決めることができました。軌道上決勝は、シミュレータの環境と国際宇宙ステーションの環境が異なることを想定し、昨年度の軌道上決勝の動画を参考にしながら、予想外の事態が発生しても対処できるようなプログラムへと変更しました。実際に軌道上決勝での動作を見ると、やはりシミュレーション時よりもAstrobeeの移動誤差が大きくなっており、プログラムの変更が功を奏する形となりました。
今回のKibo-RPCを通じて、きぼう運用管制室の見学や宇宙飛行士との交流といった大変貴重な体験ができました。高校生のころ漫画『宇宙兄弟』を読み、憧れた世界に少しだけ踏み込めたような気がして嬉しかったです。
授業「宇宙システムイニシアティブ」の概要
「宇宙システムイニシアティブ」(旧名:宇宙システムプロジェクト)は、工学院 機械系の松永三郎教授を中心に複数の教員が担当する衛星システムとロケットシステムの2大分野をテーマとする修士課程学生向けの授業です。
衛星システムでは、「小型衛星システムとミッションアイデア」または「宇宙機のダイナミクスおよび制御」について、学生自らの発表や提案、検討を軸に、必要な知識や参考資料を随時提供しながら講義を進めます。衛星設計コンテスト、宇宙機制御コンテスト、きぼうロボットプログラミング競技会などに実際に参加して作品を製作、提出することを1つの目標としています。
ロケットシステムでは、巨大システム設計の象徴であるロケットの設計、開発および打上げ運用の概要と、エンジン開発燃焼試験、ロケット打上げ作業を、映像等を交えながら紹介します。システム設計手法、ロケットサイジング基礎、誘導制御/構造/電気/推進等の各系統について、一連のロケット設計の概念と基礎を習得することを目的としています。
- 「きぼう」ロボットプログラミング競技会 (Kibo-RPC)|JAXA 有人宇宙技術部門
- 「きぼう」日本実験棟|JAXA 有人宇宙技術部門
- 2022年度 宇宙システムイニシアティブ Space Systems Initiative|TOKYO TECH OCW
- 機械コース(大学院課程)|教育|工学院 機械系

おすすめ記事
-
2026.05.25
-
2026.05.19
-
2026.05.19
-
2026.03.31
-
2026.03.31
![]()