機械系 News
可変形状姿勢制御実証衛星「ひばり」を開発
JAXA革新的衛星技術実証2号機の実証テーマとして打ち上げへ
要点
- 50 kg級可変形状実証衛星「ひばり」を開発、10月1日以降にJAXA内之浦宇宙空間観測所から打ち上げられる。
- 4枚の可動太陽電池パドルを持ち、パドルを動かすことで衛星の高速姿勢制御や軌道制御を行うVSAC装置の実証実験を行う。
- エイブリック株式会社と共同開発した紫外線カメラを搭載し、衛星軌道上から紫外線発光を撮影するなど、各ミッションを実施する。
概要
東京工業大学 工学院 機械系の松永三郎教授(機械コース 主担当)を中心とする研究チーム(※1)は、50 kg級の技術実証超小型衛星「ひばり」を開発した。本衛星は可変構造を利用した姿勢制御・軌道制御 “VSAC”(Variable Shape Attitude Control)の軌道上技術実証を目的としており、4枚の可動太陽電池パドルを動かした際の反動で姿勢変更を行う。また、パドルを展開したりすぼめたりすることで、大気抵抗を調整し、軌道制御にも応用できる。
「ひばり」は宇宙航空研究開発機構(JAXA)の革新的衛星技術実証2号機の実証テーマとして採択されており(※2)、2021年10月以降にイプシロンロケット5号機にて内之浦宇宙空間観測所から打ち上げられる。投入予定軌道は近地点高度547 km、遠地点高度565 km、降交点地方太陽時 9:30の太陽同期軌道[用語1]であり、宇宙空間にて、VSACの技術実証を行う。更に、観測装置としてパドルの動作を確認するための小型カメラの他、精密姿勢誘導のための可視光望遠鏡、そしてエイブリック株式会社(東京都港区)と共同で開発した紫外線カメラを搭載している。北極や南極上空のオーロラからの紫外線放射を撮影し、地球磁気圏と荷電粒子の相互作用の現場を観測するなど、革新2号機のミッション実施を予定している。
- ※1プロジェクトメンバー:
東京工業大学 工学院 機械系 松永三郎 教授
東京工業大学 工学院 機械系 中条俊大 助教
東京工業大学 理学院 物理学系 谷津陽一 准教授
東京工業大学 理学院 物理学系 河合誠之 教授
エイブリック株式会社 - ※2
テーマ名称:「超小型衛星による可変形状機能を用いた姿勢制御の軌道上実証」
提案代表者:東京工業大学 松永三郎教授
(参考)JAXAウェブサイト「革新的衛星技術実証2号機のテーマ インタビュー」
研究内容
「ひばり」の外観上の大きな特徴は、VSACを実現するためのモーターで駆動できる4枚の可動太陽電池パドルシステム(VSAC装置)である。これらを適切に駆動し、パドルが動く際の反動を利用することで、衛星の姿勢を任意の方向へ向けるための回転や停止といった動作を迅速かつ高効率に制御することができ、さらに、「ひばり」ではリアクションホイール(RW)を併用することで高精度かつ安定な指向制御ができる。また、4枚のパドルの開閉により大気抵抗が変化するため、スラスター(推進装置)なしで軌道制御(降下)を実現することができる。このように衛星自身に可変形状機能を付与して制御することで、従来の単独のアクチュエータではできなかった姿勢運動および並進運動の両方に関して、高効率かつ推進剤フリーで制御が可能になる。また、VSAC実験では、軌道上でパドルの開閉状態を小型カメラで撮影するとともに、スタートラッカー[用語2]や可視光望遠鏡と連携した精密姿勢誘導制御実験を行う。
また、「ひばり」にはエイブリック株式会社と共同で開発した紫外線カメラUVCAM![]() が搭載されている。日焼けの原因として知られる紫外線は、オゾン層などによって遮られるため地球上ではほとんど観測することができず、天文学分野においては未開の波長帯になっている。本研究では紫外線での天体観測のための基礎実験として高度550~565 kmの宇宙空間から、高層大気からの輝線放射[用語3]や高緯度地域上空のオーロラからの紫外線などを計測する。
が搭載されている。日焼けの原因として知られる紫外線は、オゾン層などによって遮られるため地球上ではほとんど観測することができず、天文学分野においては未開の波長帯になっている。本研究では紫外線での天体観測のための基礎実験として高度550~565 kmの宇宙空間から、高層大気からの輝線放射[用語3]や高緯度地域上空のオーロラからの紫外線などを計測する。
次に、地球画像を用いた3軸姿勢決定実験[用語4]として、連続地球画像を用いた相対姿勢推定[用語5]や革新1号機で運用実証したAI応用画像識別を用いた3軸地球センサ「DLAS」[用語6]の後継実験を実施する。そして、搭載しているGlobalstar送信機「STINGR」[用語7]を用いた地上とのリアルタイム通信の実証実験を行う。さらに、「ひばり」に搭載されるバス機器[用語8]は、超小型衛星標準バスとしてCubeSat規格に遵守して開発が行われた。軌道上でのロケット分離後から定常状態を経て、上記の各種ミッションを実施する過程にて、超小型衛星に適したバス機器としての機能を実証する。
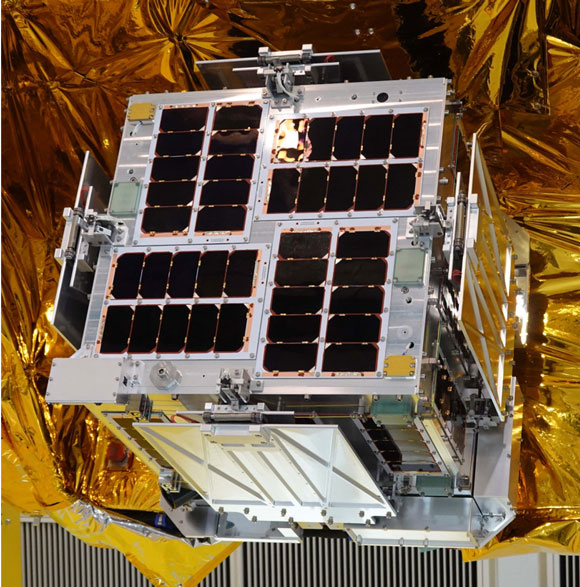
図1. ひばり衛星の外観
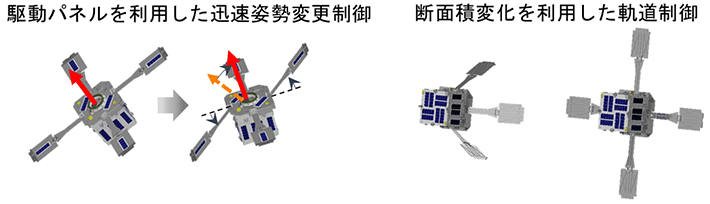
図2. VSACの概念図
背景と経緯
100 kg以下の“超小型衛星”は開発期間が短く、安価に開発できることから、宇宙ビジネスでも盛んに利用されるようになってきた。松永三郎教授を中心とする研究チームは平成30年度文部科学省 宇宙科学技術推進委託費 宇宙連携拠点形成プログラムにて「新宇宙産業を創出するスマート宇宙機器・システムの研究開発拠点![]() 」を提案し、東工大を産学連携の宇宙開発拠点とすべく、産業界へ向けて宇宙開発の基盤技術から海外のビジネス動向など、様々な切り口で情報発信を行い、宇宙における産学連携を積極的に推進してきた。
」を提案し、東工大を産学連携の宇宙開発拠点とすべく、産業界へ向けて宇宙開発の基盤技術から海外のビジネス動向など、様々な切り口で情報発信を行い、宇宙における産学連携を積極的に推進してきた。
本研究はこの拠点形成プロジェクトから創出された事業の一つであり、リモートセンシングビジネスで、より高精度の観測を高い効率で実現するための方法として考案されたものである。地上のターゲットを精密に観測するためには素早い姿勢変更速度と写真がブレない姿勢安定性が同時に要求される。小さな衛星は慣性モーメントが小さいため、素早い姿勢変更には適している反面、安定性を維持することは原理的に難しく、様々な研究が行われている。この様な課題を解決するために、本研究グループは衛星構造を変形する際の反動を利用したVSACという独自の衛星姿勢制御法考案し、高速な姿勢変更を高効率で実現することに加え、さらに、高安定な姿勢指向制御の実現に向けて研究・開発を行ってきた。
これまで、東工大では大学単独での衛星開発を行ってきたが、「ひばり」では、「新宇宙産業を創出するスマート宇宙機器・システムの研究開発拠点(スマートスペース拠点)」を基点として構築された様々な協力によって実現されている。UVCAMの開発を担当したエイブリック株式会社との産学連携は、この拠点から生まれた連携の一つである。
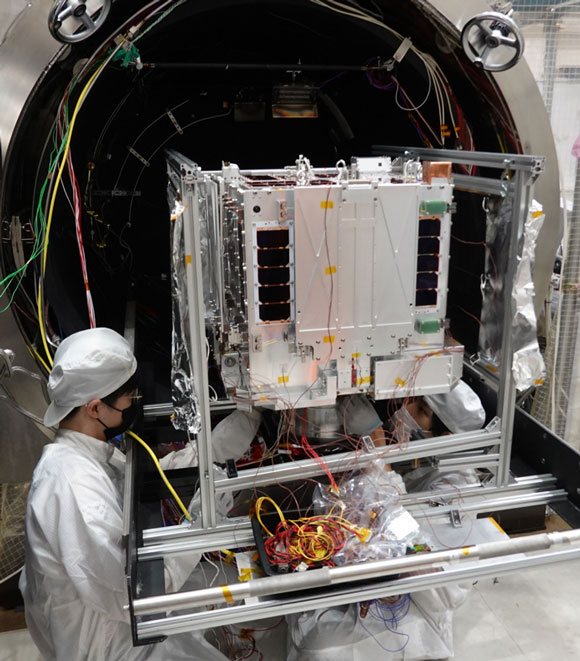
図3. ひばり衛星の熱真空試験風景
今後の展開
「ひばり」は2021年10月1日以降にJAXA内之浦宇宙空間観測所からイプシロンロケット5号機によって打ち上げられる予定である。ロケットからの衛星分離後、太陽電池パドルが展開されるまでのクリティカルフェーズ[用語9]運用が行われる。その後、システム健全性を確認して、姿勢制御実験や地球画像を利用した姿勢決定実験、紫外線天体観測を順次開始する。ミッション期間は1年を予定している。
図4. 射場への輸送直前の集合写真

図5. JAXA内之浦宇宙空間観測所にて、ひばり衛星引き渡し後の記念撮影
- 用語説明
[用語1] 太陽同期軌道 : 衛星と太陽の位置関係が常に同じになる軌道。
[用語2] スタートラッカー : 人工衛星や宇宙探査機の姿勢決定に用いられるセンサ。恒星の配置に対して人工衛星の姿勢がどの方向に向いているかを定量的に決めて、高精度な姿勢決定を行う。原理上1台で姿勢決定できるが、直交方向に2台(以上)配置して冗長性を担保することが多い。
[用語3] 輝線放射 : 原子や分子内の内部エネルギー遷移に伴う電磁波放射であり、物質の種類や状態に従い特定の波長で放射される。この波長や強度を調べることで、どの様な物質がどのような状態で存在しているのかを知ることができる。
[用語4] 3軸姿勢決定実験 : 人工衛星や宇宙探査機の姿勢を3次元的に決める姿勢決定の実験。「ひばり」では、地球の周回軌道上で撮影した地球画像に対して海岸線などの地図情報と画像識別を用いて姿勢決定を行う。
[用語5] 相対姿勢推定 : 上記の地球画像と地図情報を利用して決定された姿勢(ここでは絶対姿勢と呼ぼう)を基準にして、周回軌道上で撮影された複数の連続画像の中から雲や山などの連続変化量を抜き出して得られる姿勢角速度を基に、絶対姿勢に対する自機の相対的な姿勢情報を推定する技術。
[用語6]
3軸地球センサ「DLAS」 : DLAS(Deep Learning Attitude Sensor)は、東工大が開発した小型スタートラッカーと地球カメラからなる衛星搭載実験装置であり、JAXAの革新的衛星技術実証1号機に搭載され、2019年に打ち上げられた。地球カメラは雲間から見える陸地の形状を独自のAIを用いてリアルタイムで識別し、予め記憶させた地図情報と比較することで衛星の向きを推定する。2020年の運用終了までに、およそ4000枚の衛星画像を取得し、深層学習を使ったものとしては世界初の衛星軌道上・リアルタイム画像認識と、それを利用した3軸姿勢推定に成功した。DLAS Project![]()
[用語7] Globalstar送信機「STINGR」 : 米国グローバルスター社の衛星通信網を利用した無線送信機である。もともと、地上の建設機械等の監視(M2M)などを目的に作られた無線装置である。全球の90%以上をカバーできるため、衛星の状態監視や突発的な天文現象監視に応用できる。
[用語8] バス機器 : 電力供給、データ処理、姿勢制御、通信など人工衛星の基本的な機能や動作に必要な基本機器。
[用語9] クリティカルフェーズ : 打ち上げられた人工衛星や宇宙探査機が、ロケットから分離すると同時にスタートする運用フェーズのことで、衛星を誕生させるために最も重要でありかつ危険が大きい。通信の確保と初期確認、折り畳まれていた太陽電池パドルの展開、電源の確保(発電の確認)、姿勢を安定させるための制御などが自律もしくは遠隔で行われる。
- 産学連携でつくるオーロラ観測用紫外線カメラ打ち上げへ|東工大ニュース
- 産学連携のチームによる陸・海観測超小型衛星プロジェクト|東工大ニュース
- 研究テーマを宇宙で実証 JAXAのイプシロンロケット4号機で打上げへ|東工大ニュース
- 深層学習でリアルタイム軌道上画像識別を実現|東工大ニュース
- 大学発超小型人工衛星「TSUBAME」打ち上げ成功・運用開始|東工大ニュース
- "近所" で爆発した宇宙のモンスター —観測史上最大級のガンマ線バーストを日本のグループが宇宙と地上から観測—|東工大ニュース
- 超小型人工衛星で宇宙産業を切り拓く|研究ストーリー|研究
- 松永・中条研究室
- 河合・谷津研究室
- 研究者詳細情報(STAR Search) - 松永三郎 Saburo Matunaga
- 研究者詳細情報(STAR Search) - 谷津陽一 Yoichi Yatsu
- 機械コース(大学院課程)|教育|工学院 機械系
- 理学院 物理学系
- エイブリック株式会社
- 研究成果一覧


お問い合わせ先
ひばり衛星
東京工業大学 工学院 機械系
教授 松永三郎
E-mail : Matunaga.Saburo@mes.titech.ac.jp
Tel : 03-5734-3176 / Fax : 03-5734-2644
紫外線カメラ
東京工業大学 理学院 物理学系
准教授 谷津陽一
E-mail : yatsu@hp.phys.titech.ac.jp
Tel / Fax : 03-5734-2224
紫外線センサ開発・半導体デバイス研究開発
エイブリック株式会社 コーポレートコミュニケーションチーム
E-mail : pr@ablic.com
Tel : 03-5877-2011 / Fax : 03-5877-2006
おすすめ記事
-
2026.06.12
-
2026.05.25
-
2026.05.20
-
2026.05.19
-
2026.05.19
![]()