機械系 News
世界最長10 mの超長尺多関節ロボットアームで、水平方向10 kg保持を達成
廃炉調査への利用可能性を2019年度中に検討予定
NEDOと東京工業大学(工学院 機械系 遠藤 玄准教授)は、狭い場所に進入できる細くて長いロボットの開発に取り組み、世界最長となる全長10 mの超長尺多関節ロボットアームを2018年9月に開発し、今回、アーム手先で10 kgの物体を水平方向に保持できることを実証しました。

図1. アーム手先で10 kgの水平方向保持を実証
テコの原理が働くため、長いロボットアームが重量物を保持することは容易ではありません。そこで今回、複数の化学繊維ロープを関節の滑車に巻きかけ、荷重を分散して支えることによって、これを実現しました。今後は、水平方向の保持だけでなく、重量物の持ち上げや運搬の実現に向けた技術開発を進めていきます。
今回、重量物の保持を実証できたことで、橋梁・トンネルなどの大規模構造物のインフラ点検作業などへの応用が期待できます。また、2019年度に日本原子力研究開発機構の楢葉遠隔技術開発センター(福島県)で、廃炉調査への利用可能性を検討する予定です。

直径20 cm、重量300 kg(アーム部50 kg、基部250 kg)

概要
老朽化した橋梁や大規模構造物の点検は重要課題であり、特に人による作業が難しい場所でのロボットアームの応用は喫緊の課題です。
そこで、国立研究開発法人 新エネルギー・産業技術総合開発機構(NEDO)と国立大学法人東京工業大学は、狭い空間に進入できるような細くて長いロボットの研究開発※1に取り組み、アーム全長10 m、直径20 cm、重量300 kgで、可動域は最大高さ10 m、水平8 mの世界最長※2の超長尺多関節ロボットアームを2018年9月に開発しました。
そして今回、このロボットアームの手先で、10 kgの物体を水平方向に保持できることを実証しました。テコの原理が働くため、長いロボットアームが重量物を保持することは容易ではありません。そこで、複数の化学繊維ロープを関節の滑車に巻きかけ、荷重を分散して支えることによってこのロボットアームを実現しました。今後は、水平方向の保持だけでなく、重量物の持ち上げや運搬の実現に向けた技術開発を進めていきます。
このロボットアームは、細長い形状で多くの関節を持つことから、障害物の回避、狭い場所への進入や探査が可能です。今回、10 kgの重量物の保持を実証できたことで、橋梁・トンネルなどの大規模構造物のインフラ点検作業における目視・打音検査の自動化などへの応用が期待できます。
なお、アーム全長10 m、直径20 cm、保持10 kgというスペックは、ロボットアームが原子力発電所の原子炉格納容器中心部に到達し、各種調査機器を搬送するための目標値であり、実際の廃炉作業に関わる企業へのヒアリング結果として、東京工業大学が設定したものです。
また、2019年度には、国立研究開発法人日本原子力研究開発機構の楢葉遠隔技術開発センター(福島県)で、構造物が狭く入り組んでいる廃炉現場を模した環境において、アーム手先の位置決め精度を測定し、アーム手先に取り付けたカメラによる目視や、各種センサーを用いた調査作業への利用可能性を検討する予定です。
本ロボットの最新の研究成果については、3月14日、15日に富山県黒部市で開催される第24回ロボティクスシンポジア![]() で東京工業大学が発表しました。
で東京工業大学が発表しました。
※1
研究開発
事業名 : 次世代人工知能・ロボット中核技術開発/革新的ロボット要素技術分野/高強度化学繊維を用いた『超』腱駆動機構と制御法の研究開発
実施期間 : 2015年度~2019年度
※2
世界最長
地上用垂直多関節型マニピュレータとして。東京工業大学調べ(2019年3月13日現在)
今回の成果
ロープによる多関節駆動機構
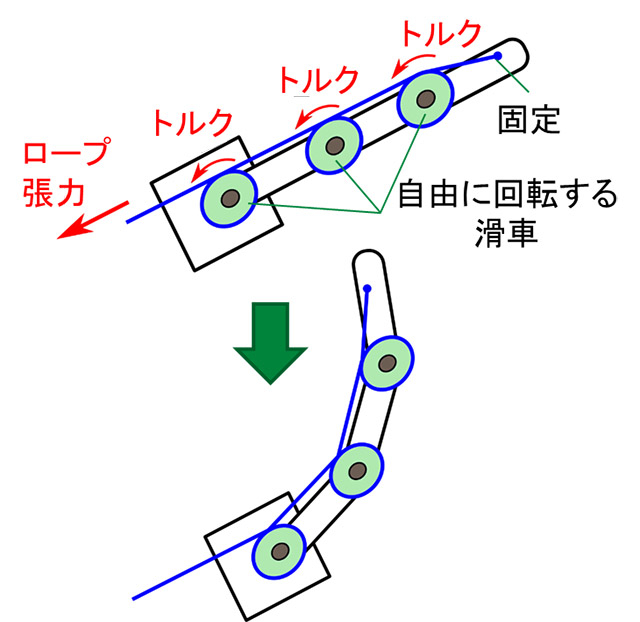
図4. ロープによる干渉駆動の原理
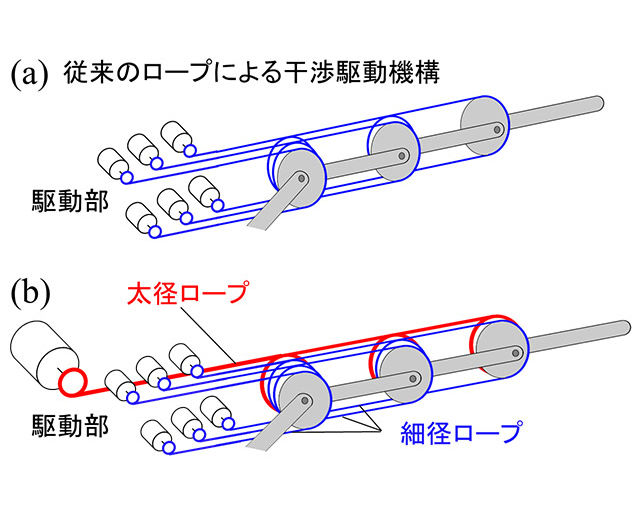
ロープによる関節駆動機構は、重量物である駆動部を根本部分に集中して配置できるため、アーム本体を軽量化できる利点があります。各関節には自由に回転する滑車が取り付けられており、その滑車にロープが巻きかけられています。ロープ先端部をアームの手先に固定して根元を引っ張ると、手先関節に力(トルク)が発生しますが、同じ大きさのトルクが経由する全ての関節に発生します(図4)。この特性を利用すると、手先関節を動かすためのトルクも根元関節の駆動に利用できるため、根元部分で大きなトルクを発生させることができます。この機構(図5(a))に対し、今回新たに中心部分に太径のロープを一本通し、アーム自重の大部分を太径ロープで支え、各関節の細かな動きを細径ロープで個別に制御する手法を開発しました(図5(b))。この機構により、複数の化学繊維ロープで荷重を分散して支えることで、従来に比してさらに大きな手先荷重を支えることが可能となり、今回10 kgの水平保持を実現することができました。(図6)。太径ロープの直径は5.5 mmで駆動部により最大3,000 kg重の張力を発生させています。
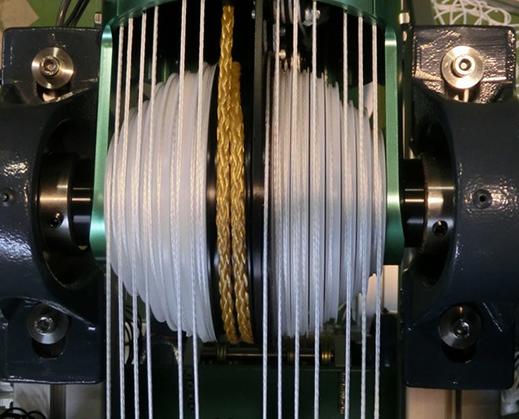
高強度化学繊維ロープによる腱駆動
高強度の化学繊維ロープは釣り糸や漁網、防弾チョッキなどに実用化されており、国内の繊維メーカーは、世界で大きなシェアを有しています。ステンレススチール製のロープに比較して、重さは1/8でありながら強度はおよそ2倍と、軽くて強いことが特徴です。一方で、時間経過とともに徐々に伸びてしまう特性や、滑らかで滑りやすいため端部を固定することが難しいなどの課題もありました。
本プロジェクトではこの化学繊維ロープをロボットの関節駆動に用いるための基礎的な特性を調査するとともに、それらの課題を解決する駆動機構要素群の開発を行い、実際にロボットアームに適用してその有効性を確かめ、高強度化学繊維ロープ腱駆動によるロボットシステム構築の手法を系統的に確立しました。
これにより、10 kg水平保持に必要な化学繊維ロープの選定、関節機構の設計、強力な張力を支えるためのロープの端部固定などが実現できました。
- 鈴森・遠藤研究室
- 研究者詳細情報(STAR Search) - 遠藤玄 Gen Endo
- Suzumori Endo Robotics Laboratory|youtube
- NEDO:国立研究開発法人新エネルギー・産業技術総合開発機構
- 第24回ロボティクスシンポジア
- 研究成果一覧

本ニュースリリース内容 お問い合わせ先
NEDO ロボット・AI部
中井、渡邊
Tel : 044-520-5242
東京工業大学 工学院 機械系
准教授 遠藤玄
E-mail : endo.g.aa@m.titech.ac.jp
その他NEDO事業について
NEDO 広報部
藤本、坂本、佐藤
E-mail : nedo_press@ml.nedo.go.jp
Tel : 044-520-5151
東京工業大学についての一般的な問い合わせ
東京工業大学 広報・社会連携本部 広報・地域連携部門
E-mail : media@jim.titech.ac.jp
Tel : 03-5734-2975 / Fax : 03-5734-3661
おすすめ記事
-
2026.06.12
-
2026.05.25
-
2026.05.20
-
2026.05.19
-
2026.05.19
![]()