生命理工学系 News
本学学生がIoT活用のベビーカー開発コンテストで最優秀賞を受賞
東京工業大学の学士課程学生5名によって構成されるチームが3月20日、神田明神ホール(東京都)で開催されたピジョン株式会社主催「ピジョン 学生アイデアコンテスト2019 『ベビーカソン』(以下ベビーカソン)」において、最優秀賞を受賞しました。
生命理工学院からは、藤田創さん (生命理工学院 生命理工学系 学士課程3年)、小野沙桃実さん(生命理工学院 生命理工学系 学士課程3年)が参加しました。

最優秀賞を受賞した東工大チーム(左から井澤和也さん、小野沙桃実さん、藤田創さん、大西祐輝さん)
ピジョン 学生アイデアコンテスト2019 『ベビーカソン』の概要
本大会を主催した育児用品メーカー、ピジョン株式会社は、IoT(もののインターネット)などの最先端技術のいち早い導入によって、より子育てしやすい環境の実現に向け取り組みを進めています。その一環として今回「赤ちゃんやママとそのご家族の毎日をもっと快適に楽しくするIoTを活用した未来のベビーカー」について大学生を対象に提案を募集し、最終的に、東京工業大学、お茶の水女子大学、湘南工科大学、千葉工業大学、日本大学の5大学による提案の発表と審査が行われました。
ベビーカソンはベビーカーとハッカソンを組み合わせた造語です。
オリエンテーションから発表会まで、学生の皆さんから未来のベビーカーのアイデアが生み出されるまでの1ヶ月間を追ったムービー「ピジョン 学生アイデアコンテスト2019『BABYCATHON 』」を、ピジョン株式会社オフィシャルYouTube(ユーチューブ)チャンネルにて公開中です。
提案したサービス『Osampo Go』について
今回提案したOsampo Go(お散歩ゴー)は、ベビーカーシェアリングと、ベビーカーでの移動を快適にするマップが組み合わさったサービスとなっています。
ベビーカーシェアリングは、「好きな時に、好きな場所で、好きな車種を借りる・返せる」ことを強みとしています。シェアリングが普及していくことにより、混雑する場所でのベビーカー移動の回避や、遠出した先での一時的なベビーカー移動が可能になります。
またこのシェアリングサービスで使用されるベビーカーには、ベビーカーでの移動を快適にする「おさんぽマップ」が紐づけられています。このマップでは、各移動ルートの「ベビーカーでの通行のしやすさ」や、子連れに適したスポットが提示される工夫が施されています。
また専用モジュール(温湿度センサーと慣性計測装置)をベビーカーに搭載することにより、赤ちゃんにとってのベビーカーの乗り心地、及びパパ・ママにとっての使い心地をリアルタイムで可視化・記録することが可能となり、路面の凸凹についてのデータをマップに反映することにも寄与します。ベビーカーシェアリングと「おさんぽマップ」機能の両者を組み合わせることにより、それぞれのサービスのクオリティの向上、そしてOsampo Go全体としての収益化を見込んでいます。
Osampo Goでは、以下のステップにより、サービス展開を目指しています。

Osampo Goを提案する東工大チーム
Osampo Go では、以下のステップにより、サービス展開を目指しています。
- 1.シェアリングサービスの展開(副次的効果:自社製品の認知度向上)
- 2.利用データの集積、公開情報と組み合わせた情報処理
- 3.赤ちゃんにとっての乗り心地データ、及びパパ・ママにとっての使い心地データの生成
- 4.「おさんぽマップ」への乗り心地及び使い心地データの反映
- 5.シェアリングサービスの更なる利用率向上
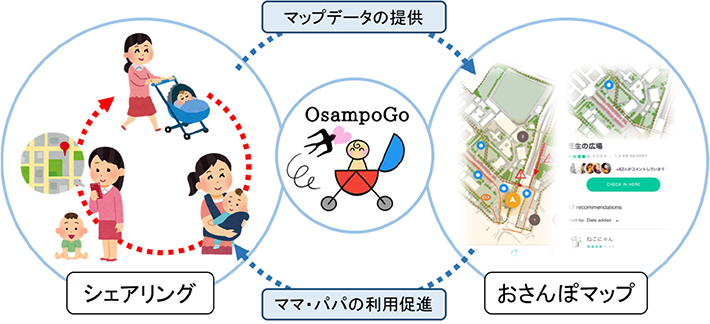
提案したサービスの概要図
参加学生とそれぞれの役割
- 藤田創さん (生命理工学院 生命理工学系 学士課程3年)
- 担当 : 全体統括、ビジネスモデル策定、渉外
- 井澤和也さん(情報理工学院 情報工学系 学士課程2年)
- 担当 : UI(ユーザーインターフェース)開発
- 大西祐輝さん(工学院 システム制御系 学士課程3年)
- 担当 : モジュール開発
- 小野沙桃実さん(生命理工学院 生命理工学系 学士課程3年)
- 担当 : マーケティング調査、コンセプト策定
- 福田萌斐さん(情報理工学院 数理・計算科学系 学士課程3年)
- 担当 : コンセプト策定
リーダーを務めた藤田さんのコメント
私は昨年の11月に、米スタンフォード大学で開催されたhealth++2018(健康医療分野のハッカソン)に参加し、総合2位を受賞しました。その際、同大学で提唱されている、健康医療分野における新規事業創出のメソッド(通称「BioDesign(バイオデザイン)」)について学ぶ機会がありました。
今回のハッカソンでは、そうした経験を少なからずは活かせたのではないかと自負していますが、それと同時に「もっと出来たはずだ」という悔しさも感じています。往々にして、対等な関係をチームメンバーに求めていましたが、時としてリーダーシップを発揮する場面が必要だったのかもしれません。
昨今、ベビー用品も含め、ヘルスケアの分野では、様々な新規事業が立案されています。中には優れた製品・サービスも存在しますが、その多くについては、顧客のニーズの同定が不十分であるという印象を受けています。
未来のベビーカーを構想するにあたっては、究極の目標として、赤ちゃんのニーズを明確化しないといけません。しかし、赤ちゃんがどう感じているかを可視化することは容易なことではなく、我々は今もなお、そのことについて試行錯誤を続けています。
引き続き関係各所の皆様と議論を続けていき、優れた製品・サービスと、それを持続可能にするビジネスモデルを確立することに注力していきたいです。加えて、現在所属する生命理工学院 藤枝俊宣研究室にて取り組んでいるナノバイオエレクトロニクスの技術を活かして、乳幼児の生体情報を集積することができるような、侵襲性の低いセンシングデバイスの開発に取り組んで参りたいと考えています。

から表彰される東工大チーム
(左二人目から井澤さん、大西さん、小野さん、藤田さん)

おすすめ記事
-

2026.07.22
-

2026.07.06
-

2026.06.24
-

2026.06.23
-

2026.06.09
![]()