システム制御系 News
生物はどのように効率的に匂い源を探索するのか?
昆虫用VRで明らかになった複数感覚の情報統合
要点
- 効率的な匂い源探索に複数感覚の情報統合が必要であることを発見
- これまで複雑環境下での匂い源探索行動を観察する方法がなかったが、VRシステムを開発したことで可能に
- ガス漏れ探索機やレスキューロボットへの応用に期待
概要
大阪大学大学院基礎工学研究科の大学院生の山田真由さん(博士前期課程)、大橋ひろ乃特任研究員(常勤)、細田耕教授、志垣俊介助教、東京工業大学工学院システム制御系の倉林大輔教授(エネルギーコース 主担当)の研究グループは、効率的な匂い源探索に複数感覚の情報統合が必要であることを世界で初めて明らかにしました。
これまで、生物の匂い源探索行動に風や視覚情報を使うことが知られていましたが、それらの情報がどのような状況下でどのように行動に反映されているかについては解明されていませんでした。
今回、志垣俊介助教らの研究グループは、昆虫用VRを開発することで、複雑環境下での匂い源探索行動を解析することを可能にしました。この行動解析により、効率的な匂い源探索に複数感覚の情報統合が必要であることを明らかにしました。これにより、ガス漏れ探索機やレスキューロボットへの応用が期待されます。
本研究成果は、オープンアクセス学術雑誌「eLife」に、2021年11月25日(木)に公開されました。
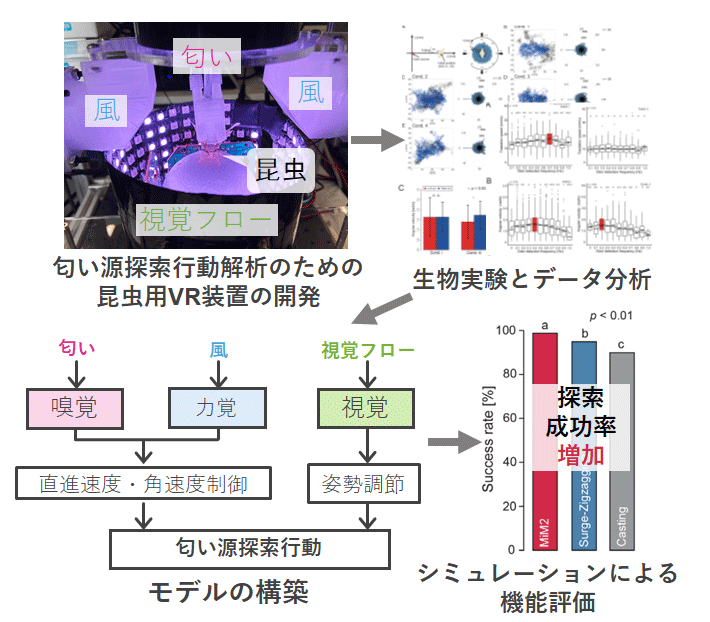
図1. 昆虫用VRを用いた行動実験からモデル検証までの一連の流れ
背景
生き物が匂い源にたどり着くことは、餌場や交尾相手と遭遇するための重要な能力です。特に、昆虫は匂いを様々なコミュニケーションツールとして用いることが知られています。昆虫は哺乳類と比べ神経細胞の数が少ないにも関わらず、優れた匂い源探索能力を有することから、匂い源探索行動の仕組みを解明するため研究対象として広く用いられています。これまでの研究から、昆虫の匂い源探索は風や視覚情報により変化することが明らかになっていました。しかし、それらがどのように情報統合され、匂い源探索行動として発現するのかはまだわかっていませんでした。さらに、実験で得られた情報から匂い源探索行動をモデル化し、ロボットに実装する試みは数多くなされていますが、人工システムが昆虫と同じ能力を得るには至っていませんでした。
研究の内容
志垣助教らの研究グループでは、昆虫の適応的な匂い源探索行動を解明するために、複数の種類の環境情報(匂い・風・光)を同時かつ連続的に提示できる昆虫用VRシステムを構築しました。そして、昆虫用VRシステムを用いて雄のカイコガが雌のカイコガを探索する際にどのように情報を統合しているかを調べました。生物学的解析から、匂い情報および風情報は歩行・回転速度の速度調整に、視覚情報は姿勢制御に寄与することを解明しました。さらに、生物学的データからモデルを構築し、シミュレーションにより機能評価しました。その結果、これまでに提案された匂い源探索モデルより高い探索成功率を示し、なおかつ生物と同様の探索軌跡を発現することが分かりました。
本研究成果が社会に与える影響(本研究成果の意義)
本研究成果は生物分野と工学分野への貢献が期待されます。
多くの生物は、環境から様々な刺激を受け取り、その都度適切な行動を選択し生存しています。刺激のなかでも匂いは、餌場や仲間に遭遇するための重要な情報です。つまり、匂い源探索行動は、生存や種の存続に必要不可欠な行動の一つであるといえます。今後このVR装置をほかの生物にも応用することで、生物の生存戦略についての知見が深まると考えています。
匂い源探索行動の仕組みを理解することは、生物学だけでなく工学分野においても重要です。匂いを利用した探索は、生物に有害なガス漏れ源探索ロボットや災害地域での人命救助ロボットへの応用が期待されます。
研究者のコメント
生物学的実験に仮想現実やロボット工学の技術を導入することで、新しい切口で生物が持つ適応的なシステムの理解が進んできました。これにより、今まで以上に生物の知的機能の解明が期待できるだけでなく、生物の適応行動をロボットに実装できれば活動範囲を格段に広げ、人間社会にロボットが溶け込める日が来るかもしれません。(志垣俊介 大阪大学 助教)
- 付記
本研究は、JSPS科学研究費(若手)19K14943、新学術領域研究(研究領域提案型)19H04930、基盤研究(B)19H02104の支援を受けて行われました。
- 論文情報
| 掲載誌 : | eLife (オンライン) |
|---|---|
| 論文タイトル : | Multisensory-motor integration in olfactory navigation of silkmoth, Bombyx mori, using virtual reality system |
| 著者 : | Mayu Yamada, Hirono Ohashi, Koh Hosoda, Daisuke Kurabayashi, Shunsuke Shigaki |
| DOI : | 10.7554/eLife.72001 |
- 倉林研究室
- 倉林大輔 Daisuke Kurabayashi|研究者検索システム 東京工業大学STARサーチ
- システム制御系(学士課程)|教育|工学院 - システム制御系
- システム制御コース(大学院課程)|教育|工学院 - システム制御系
- エンジニアリングデザインコース(学士課程)|教育|工学院 - システム制御系
- 大阪大学 基礎工学部 / 大学院基礎工学研究科
- 研究成果一覧

お問い合わせ先
大阪大学 大学院基礎工学研究科
助教 志垣俊介
E-mail : shigaki@arl.sys.es.osaka-u.ac.jp
Tel : 06-6850-5026
東京工業大学 工学院 システム制御系
教授 倉林大輔
E-mail : dkura@ctrl.titech.ac.jp
Tel : 03-5734-2548
おすすめ記事
-
2026.04.09
-

2026.02.19
-

2026.01.30
-

2025.05.23
-
2025.02.26
![]()