Systems and Control Engineering News
Tokyo Tech students in winning teams at MIT’s 30th anniversary IDC Robocon

MIT's Great Dome Building, the venue for this year's IDC
Four Tokyo Tech students joined fifty other participants from universities in Brazil, China, Egypt, India, Japan, Mexico, Singapore, South Korea, Thailand, and the United States at the 30th Robocon International Design Contest (IDC), held at Massachusetts Institute of Technology (MIT) from July 29 to August 8, 2019.
This year's contest included a particularly high amount of students from Egyptian universities, as MIT recently concluded an education agreement with the nation.
| Amrita Vishwa Vidyapeetham | 4 participants |
| MIT | 2 participants |
| National Polytechnic Institute of Mexico | 2 participants |
| Seoul National University | 5 participants |
| Shanghai Jiao Tong University | 3 participants |
| Singapore University of Technology and Design | 2 participants |
| Tokyo Denki University | 6 participants |
| Tokyo Tech | 4 participants |
| Tsinghua University | 3 participants |
| University of Sao Paulo | 2 participants |
| Zhejiang University | 4 participants |
| Egyptian universities | 12 participants |
| Thai universities | 5 participants |
Participants from Tokyo Tech
Yotaro Kimura, Systems and Control Engineering
Hikaru Koizumi, Systems and Control Engineering
Keita Takahashi, Systems and Control Engineering
Rinya Hatanaka, Systems and Control Engineering

MIT's Prof. Frey welcoming students
After some welcoming words from MIT Professor Dan Frey, the participants got straight into it by forming mixed teams to take on this year's challenge — Moonshot!
We choose to go to the moon
This year's theme, Moonshot, was selected to celebrate the 50th anniversary of the Apollo 11 landing on the moon. The competition field consisted of a Luna Module (LM), flag holes, Ascent Propulsion System (APS) charger, Unobtanium, and moon rocks. The triangular central area in front of the LM was open to both teams during each round, but areas to the left and right were only accessible by the robot designated to that side. Overall, there were seven scoring opportunities during the contest.
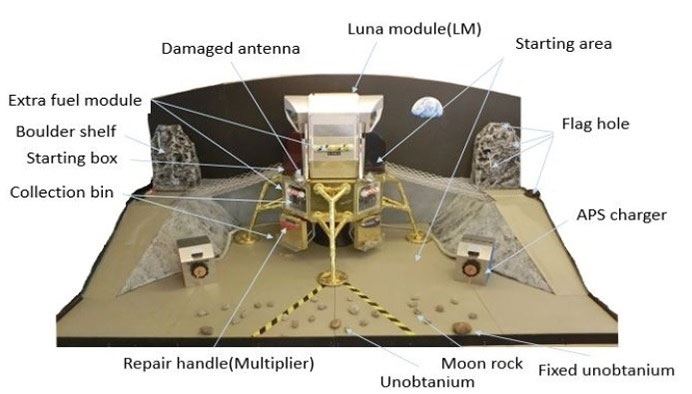
Competition field
| Scoring method | Points awarded |
|---|---|
| Place Lunar Flag Module in 1 of 4 designated rock locations | 7, 24, 48, or 72, in ascending order. |
| Collect and place moon rocks in collection bins or Lunar Module (LM) Starting Box | 5 for lower, 15 for upper container, 10 for LM Starting Box. |
| Collect and place Unobtanium in collection bin or Lunar Module (LM) Starting Box. | 15 for lower, 45 for upper container, 25 for LM Starting Box |
| Spin APS charging station to pressurize Ascent Module aerozine-50 fuel tank | Based on equation: (voltage) 2 / 2 |
| Remove extra fuel modules from LM and Descent Stage to save weight | 15 for lower fuel tank removal, 49 for upper fuel tank removal |
| Communications Repair (multiplier): Raise the damaged antenna to re-establish communication with Command Module Columbia, initiate launch for orbital rendezvous | Accumulated points multiplied by 1.2, 1.5, 2.0, or 3.0 depending on angle of antenna |
| Return robot to LM prior to launch (unless you want to stay on the moon...) | 40 for returning robot to LM prior to lift-off |

Communications Repair: Points multiplied based on angle of antenna

Purple team presenting ideas
Theoretically, teams were allowed to make more than one robot, but they had to take into account the available materials and the condition that all components of the robot(s) were to fit into two specified starting areas.
On the third day of the contest, teams had the chance to present their ideas to instructors, who then provided advice on how to improve the teams' creations. This was a precious session, as all teams had a mere twelve days to complete their machines before the final showdown.
On the final day, the 11 teams first split into three leagues, with the league losers dropping out. The remaining eight teams competed in the final round. Many struggled to maneuver on the field competition slopes. The Blue Team, which included Tokyo Tech student Keita Takahashi, and the Maron Team, which included Tokyo Tech student Rinya Hatanaka, met in the finals. Both teams had created a robot that could reliably score points by depositing field flags and transporting moon rocks to the LM. In the end, the Blue Team and Takahashi emerged victorious.
Before the winners were acknowledged at the awards ceremony, Dr. Harry West, one of the founders of the IDC Robocon, spoke about the 30-year history of the contest.


Following this, the Blue Team received the winners' medal, adorned with the official mascot of MIT.
The Maroon Team were also commended for their second-place efforts.

The event concluded with a farewell party that culminated in performances by representatives of each country, including a traditional dance by the Egyptian students and instructors.


traditional Egyptian dances
The next IDC will be hosted by China's Tsinghua University in 2020, followed by Ain Shams University in Egypt in 2021.
- IDC Robocon 2019
- Tokyo Tech hosts 2018 Robocon International Design Contest | Tokyo Tech News
- Professor Emeritus Masahiro Mori, founder of Robocon, talks to CNN about future of robots | Tokyo Tech News
- "Roots of Robocon" monument unveiled
- Tokyo Institute of Technology Fund

This event is supported by Tokyo Tech Fund
Contact
IDC Robocon team,
Department of Systems and Control Engineering, School of Engineering
Featured News




![]()