生命理工学系 News
【研究室紹介】 宮下研究室
腕運動の適応制御機構の理解へ向けて脳を探索する
生命理工学系にはライフサイエンスとテクノロジーに関連した様々な研究室があり、基礎科学と工学分野の研究のみならず、医学や薬学、農学等、幅広い分野で最先端の研究が活発に展開されています。
研究室紹介シリーズでは、ひとつの研究室にスポットを当てて研究テーマや研究成果を紹介。今回は、作業仮説とその検証実験を繰り返すことにより、身近にある最後のフロンティアと呼ばれる脳の理解を深める、宮下研究室です。

ライフエンジニアリングコース
准教授 宮下英三![]()
| キーワード | 脳科学、神経科学、運動学習、ブレインマシンインターフェース |
|---|
研究紹介
腕運動の遂行ならびに運動学習に関連する脳領域に関する研究
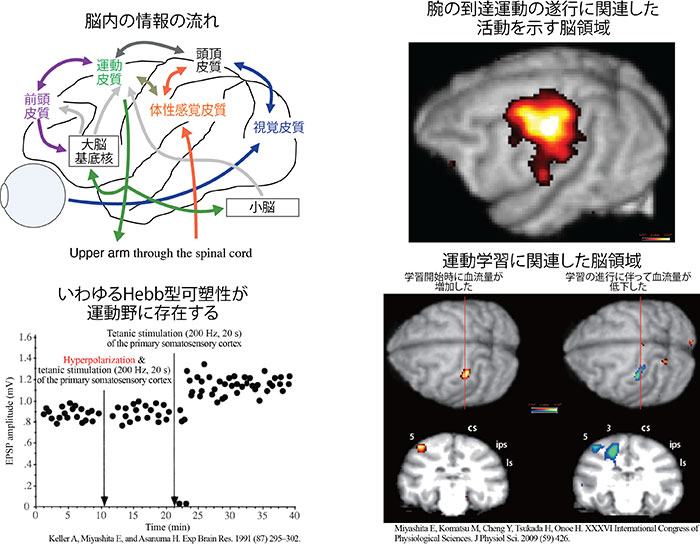
機能解剖学的な知見の蓄積のおかげで脳内の腕運動に関連した情報の流れをある程度推測することができるようになっています。そこで、腕運動を遂行する際にはどの脳領域が活動しているのか、という疑問を解決するためにpositron emission tomography(PET: SHR-7700 浜松ホトニクス)を用いて計測しました。果たして、運動野や体性感覚野、それに頭頂連合野のある領域が活動していることが分かりました。
ロックフェラー大学で浅沼廣先生の研究に携わったことから、体性感覚野から入力を受ける運動野のシナプスには、いわゆるHebb型の可塑性を示すものが存在することが分かっていました。このような可塑性シナプスの運動学習に対する機能を解明するべく、まずは運動学習に関連して活動量が変化する脳領域をPETで調べました。興味深いことに、腕運動の遂行に関連して活動する頭頂連合野のある領域が運動学習課題開始直後に活動が上昇し、学習の進行に伴って活動が低下することが分かりました。あなたならこの脳領域はどのような機能を担っていると推察しますか?
脳による腕運動制御のモデル化に関する研究
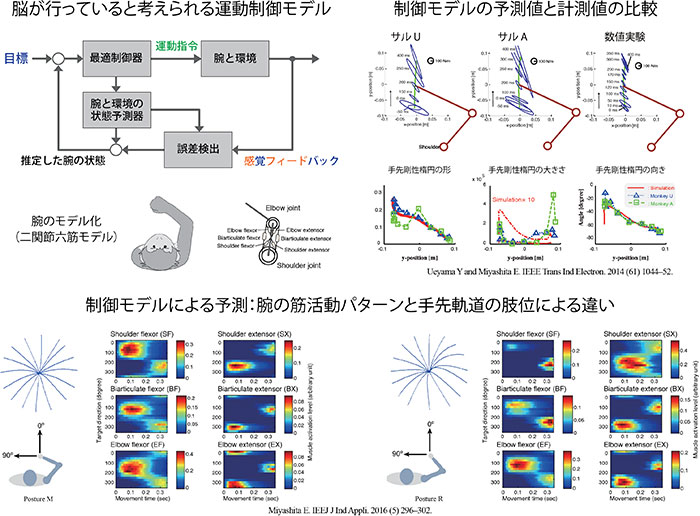
脳はどのように腕を制御しているのでしょうか?現代制御理論の助けを借りると理解しやすいと考えています。この枠組みでは、推定した腕の状態にフィードバックゲインを乗算することによって運動指令を生成することができます。状態予測器によって運動指令から腕の状態を予測し、観測値との誤差に応じて尤もらしい腕の状態が推定されます。
この制御モデルを用いて水平面上で目標に到達する腕運動をシミュレーションすると、計測した運動中の手先剛性の変化を(大きさを除いて)うまく再現できることが分かりました。また、手先軌道は運動の開始位置や運動方向に依存してほぼ直線的になったり曲線になったりすることが予想されます。
ちなみに、このシミュレーション結果があったおかげで、NHKのスイエンサー(お題は確か「定規を使わないで直線を描く」でしたか…)という番組に確信を持って出演させていただくことができました。
腕運動の脳内情報表現に関する研究
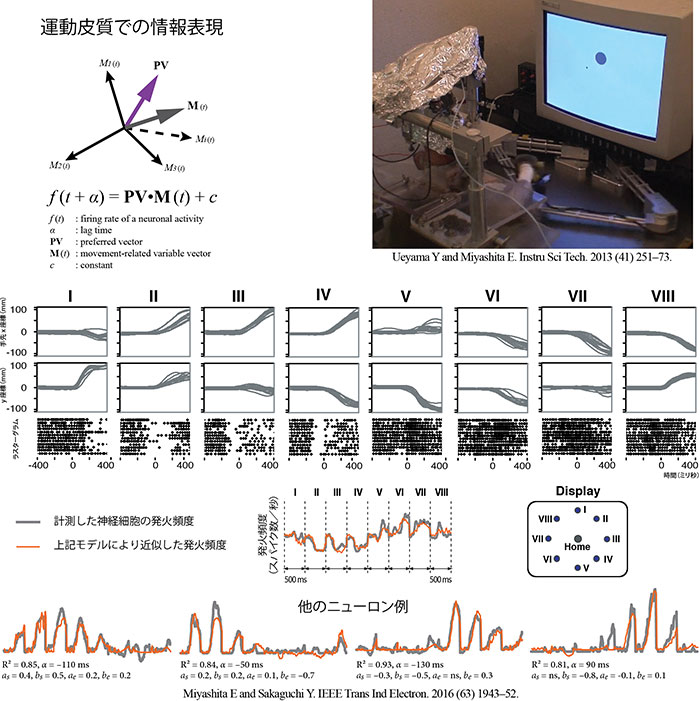
どのような計算をどのように脳が実行しているのかを理解するのが究極の目的ですが、どのような運動情報がどのように運動皮質の神経細胞活動に符号化されているのかを当面の目標として解き明かそうとしています。
単一の神経細胞活動への符号化の方法に関して、腕運動に関連した何らかの運動変数ベクトルは、その運動変数がはる空間内で規定される神経細胞活動の特徴を表すベクトル(PV: preferred vector)との内積和として運動皮質の神経細胞の活動(発火頻度)に符号化されていると捉えることができます。
水平面上の腕運動では、腕関節の関節トルクと関節角速度が運動変数として神経細胞活動に符号化されていると考えると、計測した発火頻度の変化をかなりの割合で近似することができる神経細胞が運動皮質に数多く存在することが分かってきています。
現在進行中の研究
眼球運動と腕運動の統合機構、運動学習の神経機構、神経細胞集団の活動からの情報復号等について画策中です。
研究成果
代表論文
原著論文
- [1] Miyashita E (2016), Understanding Motion Control of the Body Using Optimal Feedback Control, IEEJ Journal of Industry Applications 5 (5): 296-302.
- [2] Miyashita E & Sakaguchi Y (2016), State variables of the arm may be encoded by single neuron activity in the monkey motor cortex, IEEE Transactions on Industrial Electronics 63 (3): 1943-52
- [3] Ueyama Y & Miyashita E (2014), Optimal feedback control for predicting dynamic stiffness during arm movement, IEEE Transactions on Industrial Electronics 61 (2): 1044-1052
- [4] Ueyama Y & Miyashita E (2013), Devising a robotic arm manipulandum for normal and altered reaching movements to investigate brain mechanisms of motor control, Instrumentation Science & Technology 41: 251-273
- [5] Ueyama Y & Miyashita E (2013), Signal-dependent noise induces muscle co-contraction to achieve required movement accuracy: a simulation study with an optimal control, Current Bioinformatics 5: 16-24
- [6] Ueyama Y & Miyashita E (2012), Estimation of visual feedback contribution to limb stiffness in visuomotor control, Brain Informatics Lecture Notes in Computer Science 7670: 61-72
- [7] Komatsu M & Miyashita E (2010), Representation of a memorized target in allocentric coordinates, Australian Journal of Intelligent Information Processsing Systems 12: 41-45
査読あり国際会議論文
- [1] Miyashita E & Sakaguchi Y (2014), Suggestive evidence for a forward model of the arm in the monkey motor cortex, Proceedings of IEEE 13th International Workshop on Advanced Motion Control, P. 191-196
- [2] Ueyama Y & Miyashita E (2012), A numerical simulation using optimal control can estimate stiffness profiles of a monkey arm during reaching movements, Proceedings of 12th IEEE International Workshop on Advanced Motion Control, P. 1-6
- [3] Ueyama Y & Miyashita E (2011), Cocontraction of pairs of muscles around joints may improve an accuracy of a reaching movement: a numerical simulation study, Proceedings of 2011 International Symposium on Computational Models for Life Sciences, P. 73-82
総説記事
- [1] 宮下英三 (2016) M1のマルチニューロン活動から腕運動 臨床神経科学34 (2): 160-3.
- [2] 宮下英三 (2000) 大脳皮質運動野のシナプス可塑性 西野仁雄 他編 運動の神経科学 P. 126-136 ナップ
- [3] 宮下英三 (1998) 一次運動野と運動制御 神経研究の進歩 42: 68-77
著書
- [1] ポール・W・グリムシャー(著)宮下英三(訳)(2008) 神経経済学入門:不確実な状況で脳はどう意思決定するのか 生産性出版
教員紹介
宮下英三 准教授(医学博士)
| 1985年 | 和歌山県立医科大学 医学部 卒業 |
|---|
| 1985-1993年 | 和歌山県立医科大学 医学部 助手 |
|---|---|
| 1990-1992年 | 米国ロックフェラー大学 研究員 |
| 1993-2001年 | 岡崎国立共同研究機構 生理学研究所 助手 |
| 2001-2007年 | 東京工業大学 大学院総合理工学研究科 助教授 |
| 2007-2016年 | 東京工業大学 大学院総合理工学研究科 准教授 |
| 2016年より | 現職 |
| 1990年 | 医学博士(和歌山県立医科大学) |
|---|---|
| 1985年 | 医師免許 |
- 所属学会
- 日本神経科学学会、日本生理学会、北米神経科学学会、日本電気学会、IEEE
教員からのメッセージ
- 宮下准教授より
-
身近にある最後のフロンティアと言われる脳を探索してみませんか?計算機科学者でもあった早世のDavid Marrは、ハードウェア、計算論、そしてアルゴリズムの各階層で脳を理解するべきだと示唆しました。基本素子である神経細胞の特性や脳内の回路構成を理解するのがハードウェアの階層です。また、何を計算する必要があるかを理解するのが計算論の階層、その計算をハードウェアがどのように実行しているかを理解するのがアルゴリズムの階層です。宮下研究室では腕運動の脳による適応的な制御機構の理解を目指しています。
お問い合わせ先
准教授 宮下英三
すずかけ台キャンパス G3棟 1114号室
E-mail : miyashita.e.aa@m.titech.ac.jp
※この内容は掲載日時点の情報です。最新の研究内容については研究室にお問い合わせ下さい。
おすすめ記事
-
2023.10.31
-

2023.09.04
-
2023.07.25
-
2023.06.20
-
2023.04.25
![]()